|
导读
6 G: A. ]9 Y# v3 e中国科学院沈阳自动化研究所将水下滑翔机和水下蛇形机器人相结合研发了一款新型水下滑翔蛇形机器人,研究团队采用趋近律方法设计滑模控制器与无迹卡尔曼滤波器,对测量噪声进行滤波和对未知状态量进行估计。使得该机器人实现了净浮力驱动的滑翔运动和关节力矩驱动的多种游动步态等操作,具备续航能力强和机动强的优势,并且其提出的闭环控制框架对一些其他非线性系统具有一定的通用性。
4 T: P' D- ?4 G5 k4 E作者:长安
* n9 r' @, k) F" p. T; ]& W随着复杂水下环境中的探索需求日益增长,对相应探测设备的续航能力和机动性能有了更高的要求。水下滑翔机具有功耗低、噪声小和续航能力强的优点,适用于大江和海洋等宽阔水环境; 中国国产水下滑翔机“海燕” # g. n6 o3 i o9 o
但是其固定型的结构和仅仅依靠净浮力来驱动的特点导致水下滑翔机机动性差,使其难以有效转向及避障;蛇形和鱼形等仿生水下机器人具有高机动性的特点,可以灵活应用于水下建筑裂纹检测、水下设备维修和水下救援等复杂水下环境任务中,但存在能效低、续航差的缺点.
eelume公司研发的水下蛇形机器人 ( ^. y1 ^' x$ F9 Z# Z
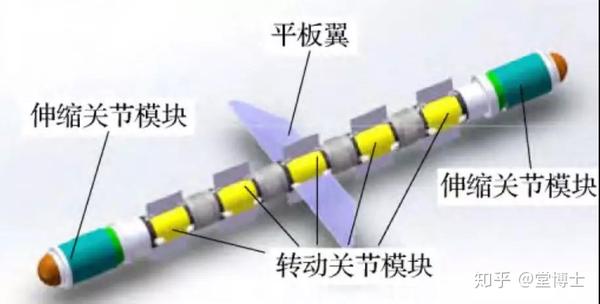
因此,中国科学院沈阳自动化研究所研制出一种结合水下滑翔机和水下蛇形机器人特点的水下滑翔蛇形机器人,该机器人可以实现净浮力驱动的滑翔运动和关节力矩驱动的多种游动步态,兼具有续航能力强和机动强的优点。
水下滑翔蛇形机器人结构示意图 1 D3 q2 ` _4 g2 S0 } r; S
中科院研究员称:针对水动力环境难以建模的问题,我们使用强化学习方法使水下滑翔蛇形机器人自适应复杂的水环境,并自动学习仅通过调节浮力来控制滑翔运动.对此,我们提出了循环神经网络蒙特卡洛策略梯度算法,改善了由于机器人的状态难以完全观测而导致的算法难以训练的问题。
循环蒙特卡洛策略梯度法的神经网络拓扑图 ) R: F! g- q$ W: d- X7 l3 `6 D
并且我们将水下滑翔蛇形机器人的基本滑翔动作控制问题近似为马尔可夫决策过程,从而得到有效的滑翔控制策略,并通过仿真和实验证明了所提出方法的有效性.
机器人正在进行滑翔运动 机器人正在进行蛇形游动 ( j2 q# g* j2 I2 g) _/ q
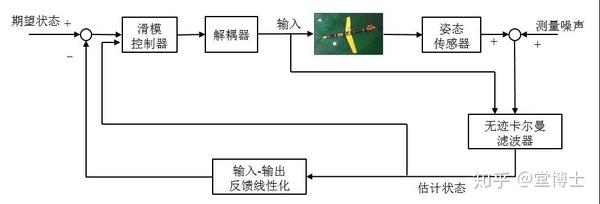
针对水下滑翔蛇形机器人的滑翔运动系统存在系统非线性耦合;实际流体不确定性、传感器测量噪声、执行器误差等引起的扰动,可能影响系统的跟踪效果;部分状态量(比如滑翔速度)较难通过传感器直接测量等问题,提出了非线性闭环控制系统框架概念。
基于无迹卡尔曼滤波器的滑模控制系统
8 [/ u+ H8 S6 x+ N通过解耦和反馈线性化,把复杂的非线性系统转化为等效的线性形式,然后基于趋近律方法设计滑模控制器,降低抖动并且实现鲁棒控制。通过无迹卡尔曼滤波器,对测量噪声进行滤波和对未知状态量进行估计,该方法通过无迹变换处理均值和协方差的非线性传递问题,保留了系统高阶项,具有精度高、稳定性强的优点。提出的闭环控制框架对一些其他非线性系统具有一定的通用性。
1 d- ^* ~' q! B/ i# w, a水下滑翔蛇形机器人实现了长航程与机动性的完美结合,自扩张部分实现水下滑翔机器人水下低动力滑翔,蛇形结构实现了机器人水下的灵活机动,将灵活运用于各种复杂水下环境任务中。: u; D. w7 X2 f" N. Z5 ?; V& }
文章来源:张晓路, 李斌, 常健, et al. 水下滑翔蛇形机器人滑翔控制的强化学习方法[J]. 机器人, 2019, 41(3):334-342.
| 



 0 |; \. t3 J( [& A: b' t1 ?4 O
0 |; \. t3 J( [& A: b' t1 ?4 O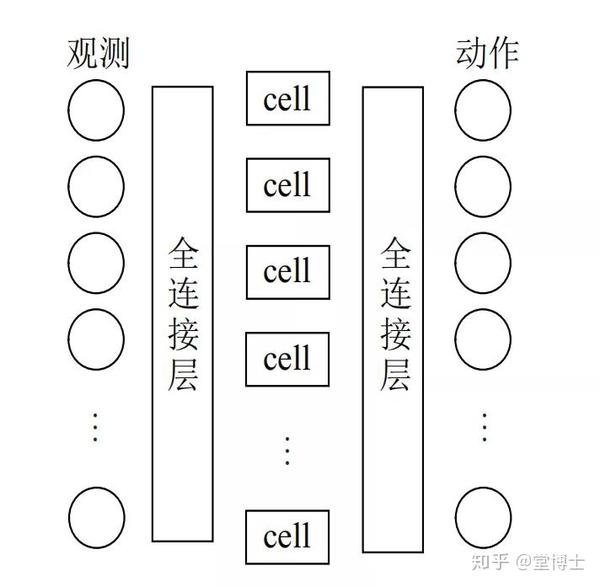 7 L0 E5 `4 B# j7 |1 g0 e/ p
7 L0 E5 `4 B# j7 |1 g0 e/ p & y8 Z8 U. X4 V& G% @1 {
& y8 Z8 U. X4 V& G% @1 {
 # o/ r% y3 o9 t2 {
# o/ r% y3 o9 t2 {