|
法国HYDROPTIC公司——UVP5水下颗粒物和浮游动物图像原位采集系统
, h( m9 S: t2 ^9 U$ A0 n' N7 e* E: v* u9 ^
5 b4 X4 ]( A* e6 ?; ]* c
 + h; [, I6 y1 E% s! `9 f4 ?7 D( u6 F8 d 登录/注册后可看大图
+ h; [, I6 y1 E% s! `9 f4 ?7 D( u6 F8 d 登录/注册后可看大图
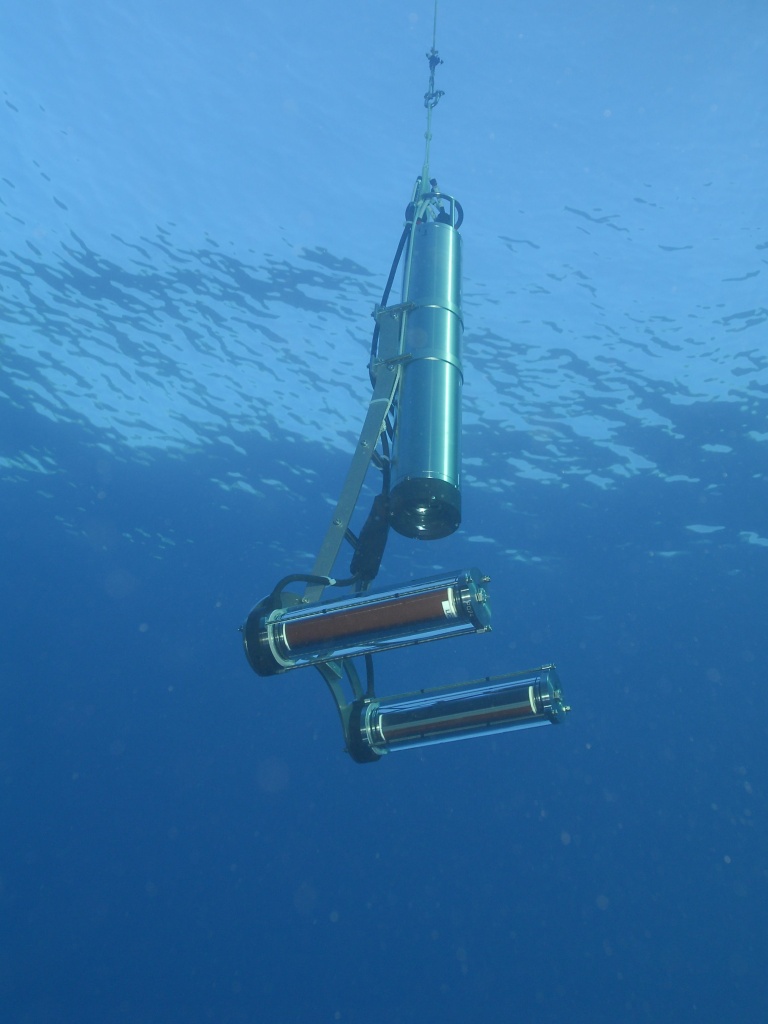
% Y- ?4 `# C% O! O1 X& t( v( \6 uUVP5水下颗粒物和浮游动物图像原位采集系统主要用来研究大型(>100 µm)颗粒物和浮游动物,可以对水中颗粒物和浮游动物进行量化。UVP5系统用传统的照明设备和经电脑处理的光学技术,来获得浮游动物原位数字图像,耐压深度6000m。
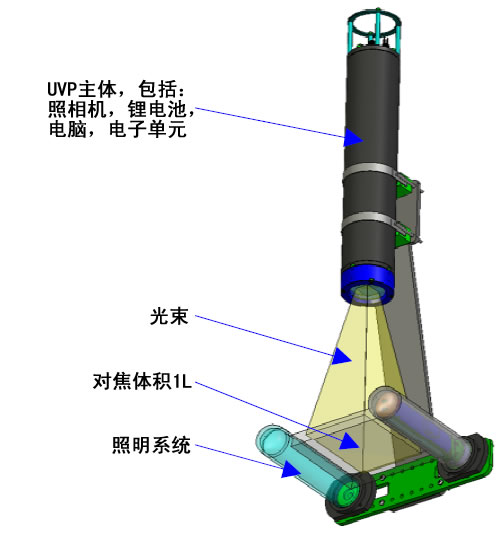
, `3 ]$ ]3 c3 f7 K UVP5能拍摄到LED闪光灯照射范围内对准焦距的清晰的浮游动物图像。光束照明区域中对焦体积为4x20cm3,这就使得每张图像测样体积为1L。当与传统的CTD测量设备相连时,颗粒物和浮游动物的分布就可以实时显示,并与CTD元数据整合到一起。 UVP5拍摄到的高分辨率数字图像可以在后期通过电脑进行处理分析。" b/ s' s- u7 T6 P+ W6 M s
UVP5主机构成图:+ C% m; k+ m9 R p
0 G- O# w) Q, l0 D4 N4 Y9 [# w2 T5 l+ | n4 V; t+ [# b3 `
) N) w% U2 l+ a" R" l& Y* u' G9 s
- r4 N7 f( `: \" T7 N# x1 i ?8 } p$ M/ b1 i& f9 x
突出特点:# A3 v6 m+ A5 B y! v
◇对浮游动物和颗粒物进行垂直剖面观测5 ^7 M) y2 q( l3 h$ c; ]2 c
◇对作业水体环境无特殊要求
8 B! K; j* Z. h) {4 \4 x& I◇耐压深度6000米
* T; N, ]$ x }◇对焦体积1.02升,信息量大
. A# }- s% E A$ M# G◇高分辨率的浮游动物图像(1024×1024像素)
. q4 O; t8 v" Q/ w% M. U
4 ^0 c0 \( W- a0 U/ [
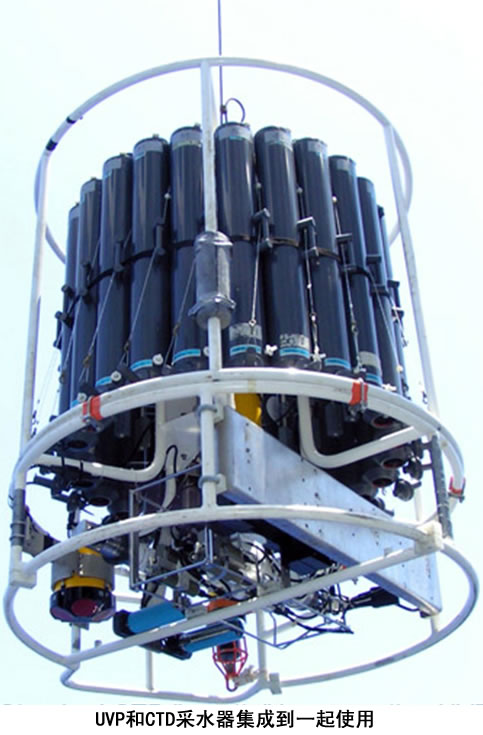
8 q$ }0 t2 t t$ ~" E◇与CTD采水器集成使用,能获取各种环境参数
1 \1 T" ?- d' r; Q8 ^+ }; U. F◇红色LED灯,不影响生物形态和活动
0 O7 e5 h' i* n◇开放式系统使得图像更具代表性
9 d/ y5 L: K+ }. s+ W: c0 {◇有国内数据库及全球数据库共享平台支撑0 t0 |# C) L% A0 u. U
◇可依据用户要求定制8 l" f8 k% j, ~ _
0 Y* ?4 c9 y3 N$ g% v5 o( d1 |
3 I9 _: E* t& g4 H, @6 y* M主要应用:, H% L$ B/ D+ s0 ?
7 _. e) p1 t; G( `. \" s
- 浮游动物和颗粒物剖面观测$ E3 a4 l+ Q1 o/ D* k s4 W; |! }. Q
- 浮游动物图像颗粒物图像原位采集
3 ~' b& ]* B# S8 g4 ^: d: o6 F2 s - 集成到CTD采水器上进行颗粒物和浮游动物图像实时采集,跟CTD数据整合到一起
8 d# ?0 D5 H3 y- m+ B5 E
& r! i' F. Z( ~" K4 |4 D
; m) D; Q' B. l' A' A# B% Q0 |2 B, Y H \) |4 g
UVP5规格:5 V; T0 O* b8 `% P0 O8 A
+ o& }3 a: m# F8 E- 工作深度:0-6000m
# a' k9 P9 p# W a* H - UVP5规格(H):110cm
5 ^+ U8 j3 B$ ^3 u! H - 空气中重量:30kg
2 o! g8 w; q* L8 z3 S - 输入电压:110-230VAC,50-60Hz
) G: L! g: _$ l - 接口:RS232,I/O,模拟输入/输出; F$ G' h2 X( n
- 照明设备:两个玻璃灯罩保护的620nm红色LED灯
+ V$ m8 S, `/ L& l: P# @& _7 I$ k: G& I - 快速处理; q+ H0 x4 f" p9 @5 n; P
- 可选的遥测技术# g5 {3 @( }/ `/ B7 E6 T$ f6 G* s
- 单独、莲蓬式、ROV、AUV或系泊浮标
! {- v- P: v" y" A - 即使在强太阳光照下也可以从表层进行采集和处理图像
8 ~$ y9 [7 _( |/ r% R& m - 标准图像体积:1.02L每个画面(大约15cm x 20cm x 3.5cm)
1 G( n) u$ _' J* D1 Y - 其他体积可按要求定做" Z: Y3 W* u, W
- 图像分辨率:采集目标>100μm
' s4 h# ^9 s: v9 c9 Q
2 y5 ]5 ~; X) [# F& P3 J
# J, i* {/ G$ X& w6 P: k
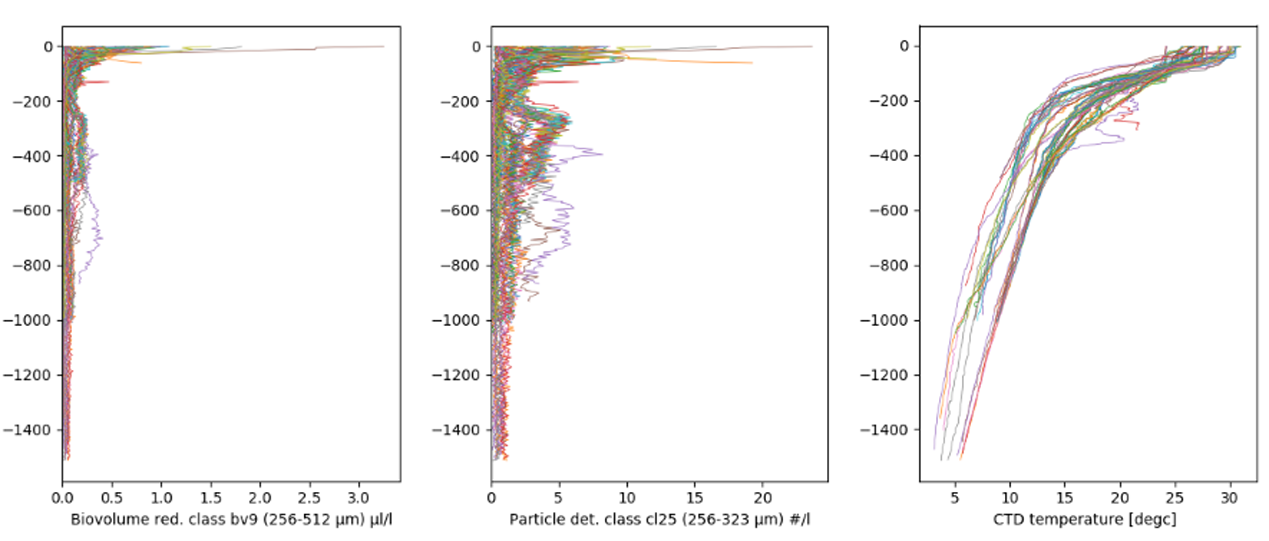
9 h% H3 G6 W- T3 m! J拍摄图片:
w/ J9 p9 }8 e9 B" I; |1 x5 t) h, o/ t/ B7 M: n2 p3 `5 N
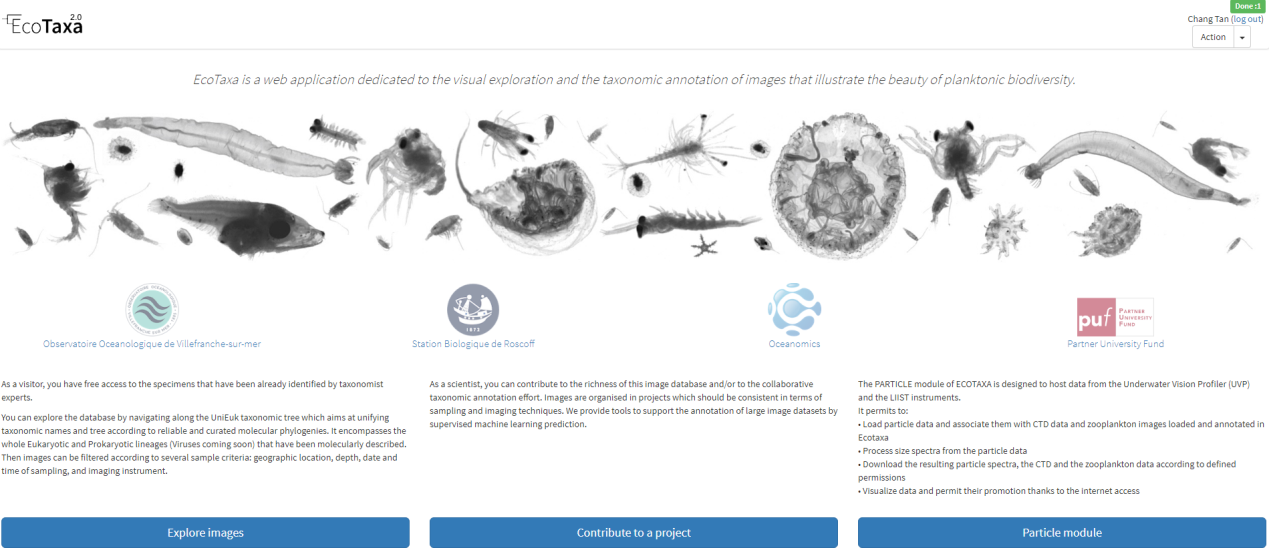
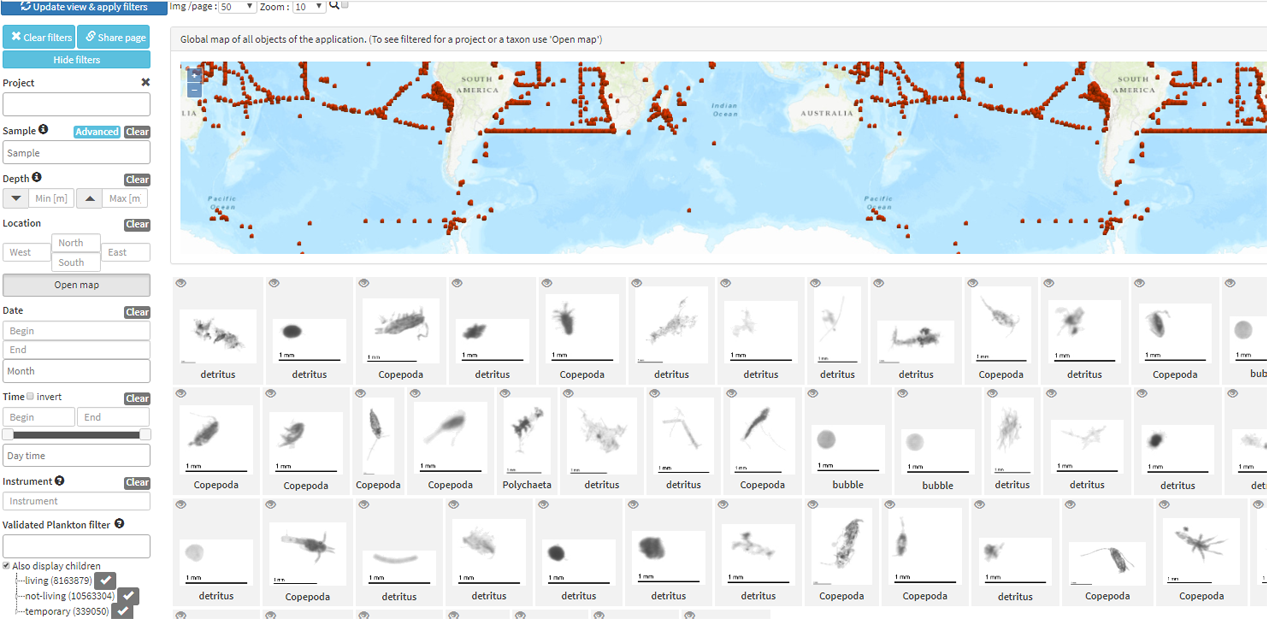
图像分析软件——EcoTaxa:. U2 e8 T! Y4 w( H5 r
% h+ U* I, V$ ] |7 m
1 C+ w, Z0 I+ p
' t1 c: k" _4 w$ t& t7 P4 y' M6 H8 o n) R
将UVP5拍摄得到的图片进行处理后上传到EcoTaxa网站,可以利用网站上已有的库或自己已创建的库对图片进行自动鉴定、分类。同时,也可以根据筛选条件绘制相应的粒径谱等。此外,用户也可以在网站上对自己感兴趣的区域、项目进行搜索浏览。
! L0 r4 y& ]; V- u( J& z
* m* S" [$ e" f, z' s# `5 Q* k3 p9 |: y. k& S8 l
代表文献:
% Q3 r' Z2 r/ } W) W1.Guidi L, Chaffron S, Bittner L, et al. Plankton networks driving carbon export in the oligotrophic ocean[J]. Nature, 2016, 532(7600):465-470.
% K" a" N) \& d' U D2.Picheral M, Guidi L, Stemmann L, et al. The Underwater Vision Profiler 5: An advanced instrument for high spatial resolution studies of particle size spectra and zooplankton[J]. Limnology & Oceanography Methods, 2010, 8(5):462-473., M0 ?0 z( C- Z0 A
3.Biard T, Stemmann L, Picheral M, et al. In situ imaging reveals the biomass of giant protists in the global ocean[J]. Nature, 2016, 532(7600):504-507.( _/ T3 a0 M2 n# |8 I; X
4.Ohman M D, Powell J R, Picheral M, et al. Mesozooplankton and particulate matter responses to a deep-water frontal system in the southern California Current System[J]. Journal of Plankton Research, 2012, 34(9):815-827.
4 ^# z* o# I% \6 O( s5.Forest A, Stemmann L, Picheral M, et al. Size distribution of particles and zooplankton across the shelf-basin system in southeast Beaufort Sea: combined results from an Underwater Vision Profiler and vertical net tows[J]. Biogeosciences, 2012, 9(4):1301-1320.
1 L) A& d/ t+ S, ]! [8 S+ f( D- K0 f3 t }# C6 ?/ U
% w k# u! J* \5 _+ @更多关键词:水下颗粒物和浮游动物图像原位采集系统,水下观测系统,浮游动物和颗粒物剖面观测,浮游动物图像颗粒物图像原位采集处理,水环境影像观测
|2 d1 v. l3 X" |6 ?
! b* N. c( w6 ^/ k7 R: z
?1 q( s4 n! u' U
% d2 J, k3 T/ f<strong> |


 7 y) _- u# c5 L5 d/ N' W6 @# X
7 y) _- u# c5 L5 d/ N' W6 @# X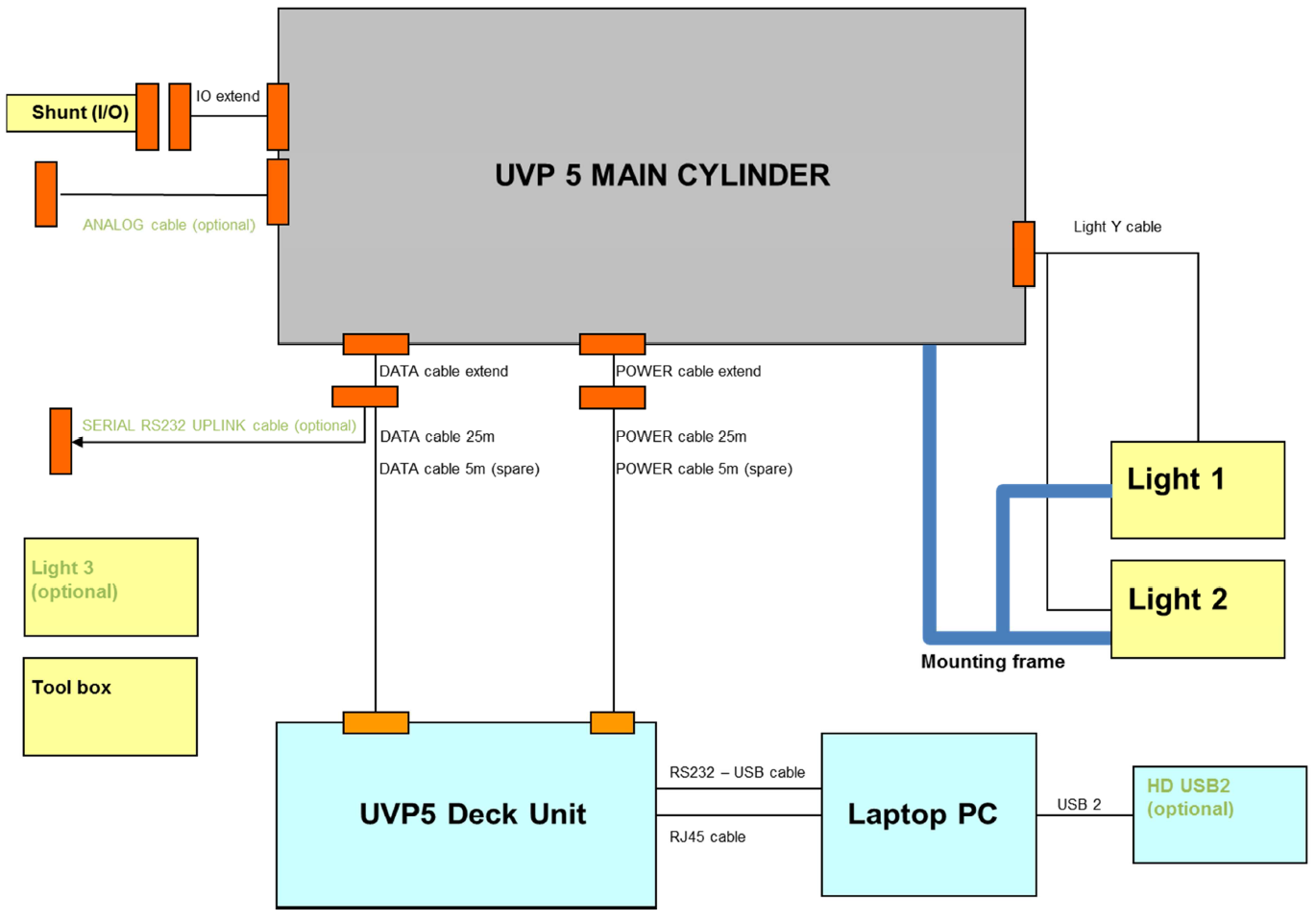
 $ q, O0 H8 j3 v9 z" K& e9 A
$ q, O0 H8 j3 v9 z" K& e9 A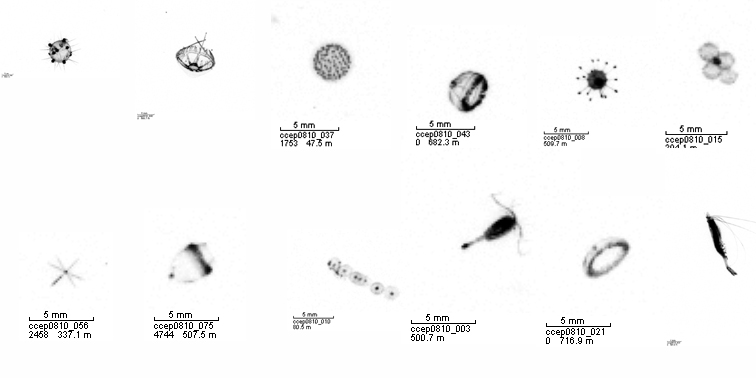
 # ~) p; T }% d9 P/ ]* H
# ~) p; T }% d9 P/ ]* H