|
4 e3 Y, M% w U# o3 P& V
原标题:技术论文|基于干扰观测器的高速列车 RBF 自适应滑模控制方法
" H8 G; O4 d, \( Y0 B% w% R' V, J0 [
欢迎引用 , }5 `- s4 ^2 D, E: h; Y
作者:刘杨,蔡晨,李卫东(大连交通大学) 0 [* H) R3 l' a7 F/ \7 h: k
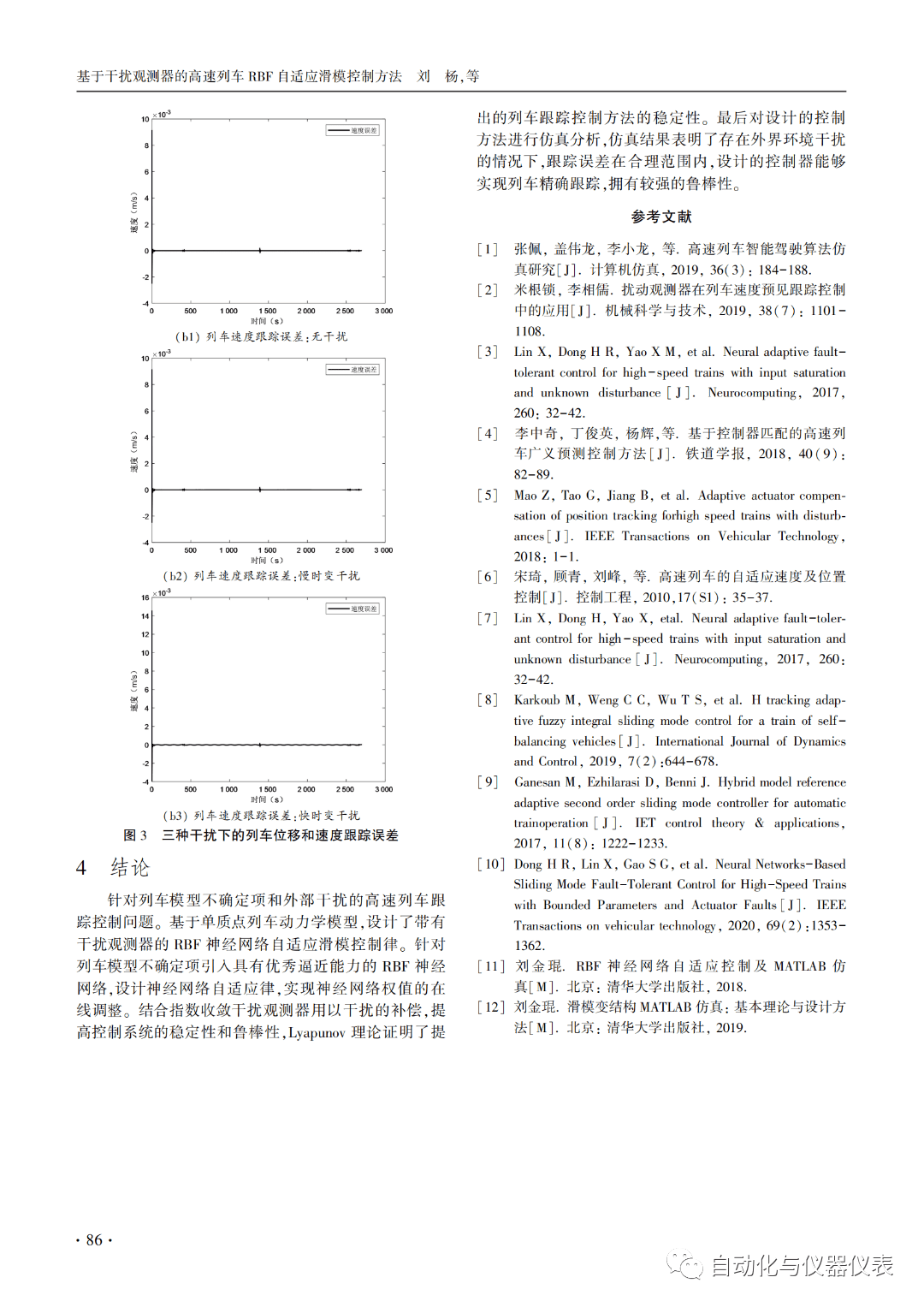
摘要:针对高速列车动力学模型的不确定性和存在外部干扰难以实现高速列车对目标轨迹的高精度跟踪控制的问题,设计了一种基于非线性干扰观测器的 RBF 神经网络自适应滑模控制方法。 首先,针对高速列车模型非线性系统的不确定性问题,设计自适应 RBF 神经网络鲁棒控制器进行跟踪控制,基于 RBF 神经网络的特性设计神经网络权值自适应律 对列车模型中的未知函数进行估计 其次 针对高速列车跟踪控制外部干扰问题 采用指数收敛干扰观测器进行干扰补偿,提高高速列车对目标轨迹追踪的抗干扰能力。 最后,李雅普诺夫( Lyapunov) 稳定性分析保证了闭环系统的渐近稳定性 以秦沈客运专线为仿真对象 结果表明 所设计的控制方法不仅解决了列车模型未知阻力部分的自适应逼近,而且在此基础上引入干扰观测器对外部非线性干扰进行补偿实现了对期望轨迹的高精度快速 跟踪。
# l* R. K) C3 P* i! h V 关键词:列车轨迹跟踪;RBF 神经网络;滑模控制;干扰观测器 0 F/ I2 i, I9 B2 u* N: T
2 s, m& ?9 t/ C. T0 \ 
- r' D: V3 q# ]8 R 
$ U. j, U9 S, }6 a6 r8 K
% ?' i6 X: n1 S+ r. n6 H
, F& T* T# p9 Z+ z- N
(来源: 自动化与仪器仪表 2022年第11期) / y) j l2 k1 P; q
关注我的你,是最香哒! 返回搜狐,查看更多
" M {! C2 J6 S1 l, V( h' d4 a* v# m# I5 N+ k! q( m; q0 p+ I& u
责任编辑:
# p' n/ R8 S: W( j/ R& i
; q4 q+ G* h% U' i: K; ]$ B1 ?" n7 g
, b: D( W$ S: C! s6 ]/ x3 K3 `& W3 g. x' X, D4 r/ r e m
| 






