UH致力于开发海底管道检测自主机器人
, C" S) ?& a2 m0 h) R. U
4 E8 I2 b, H' |' g- _. T3 O
0 E7 N% L3 o! p0 Q4 j- |1 V! F9 h- / F0 F( `0 [ i, [
- + B9 T9 S3 O! ?0 i2 e$ H
7 ~5 \/ Z% T1 D1 n
: a% I4 }" U( H8 L- 休斯顿大学正在开发用于自动海底管道检查的SmartTouch技术。图片由UH提供
1 ~" C3 i; ~. t5 {' l3 j - BSEE向UH研究人员郑晨、Bill D.Cook机械工程助理教授和宋刚兵、John和Rebecca Moores机械工程教授提供了960493美元的资助,他们正在与Oceaneering International和Chevron合作。图片由UH提供
- S2 h7 E: V7 N0 B0 w
* O4 K# I K2 L5 G9 ?6 b; B休斯顿大学研究人员正在开发识别潜在管道泄漏的自主机器人以及海底检查期间的结构故障。该技术旨在使检查过程更安全、更具成本效益。
* j8 P4 ~2 B4 t从1964年到2015年;514海上管道–记录了相关的石油泄漏,根据美国国家石油和天然气管理局的数据,其中20个泄漏量超过1000桶海洋能源管理局。
% \9 G% }3 S5 J$ M这个SmartTouch技术目前正在开发的UH包括ROV;配备了多个基于应力波的智能触摸传感器、摄像机和扫描声纳,可以沿着海底管道游泳来检查法兰螺栓–根据美国国家石油和天然气管理局的报告,螺栓连接加速了导致泄漏的管道事故的发生率安全与环境执法局。! q5 r w N3 D3 x) |
BSEE向UH研究人员提供了960493美元的资助郑晨,Bill D.Cook机械工程助理教授,宋刚兵,John and Rebecca Moores机械工程教授;他们正在与国际海洋工程公司和雪佛龙公司合作。' }3 G h& d+ X2 B1 j: V
“通过使用这种最先进的机器人技术实现检查过程的自动化,我们可以大大降低这些重要的海底检查的成本和风险,这将导致海上石油和天然气管道的更安全操作,因为需要更少的人类潜水员干预。”;陈说,ROV的原型已经在他的实验室和加尔维斯顿湾进行了测试。实验证明了所提出的检查海底螺栓连接松动的方法的可行性。初步研究由UH&rsquo的;s海底系统研究所。( ]7 @# N1 c- w
UH的研究人员正在与海洋工程和雪佛龙;将评估技术;商业化。 |



 . }4 A8 I3 X& m' h$ `7 W. H
. }4 A8 I3 X& m' h$ `7 W. H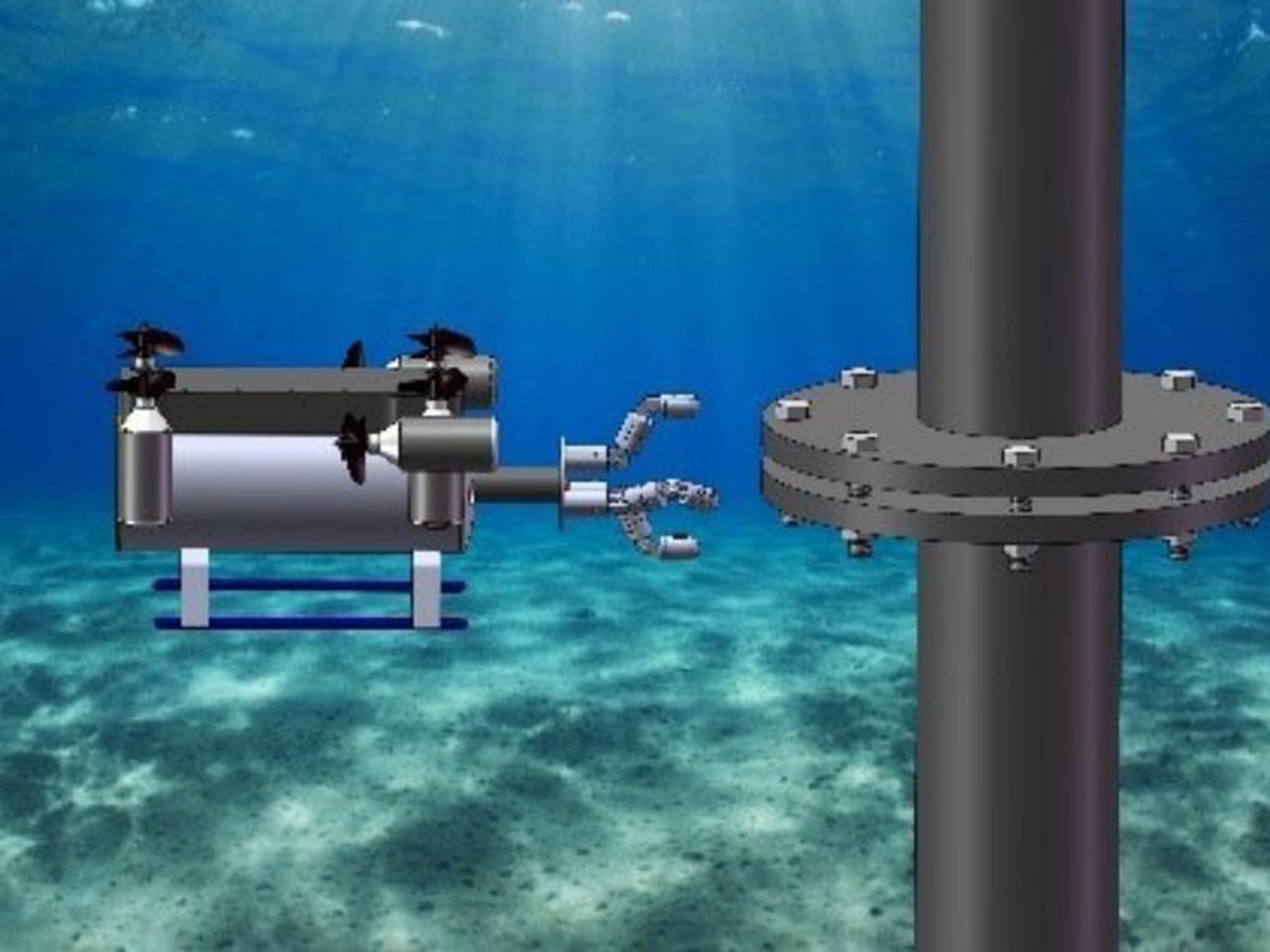
 ! R$ U0 X' c3 R2 k
! R$ U0 X' c3 R2 k